




 1x
1xتنطوي المركبات ذاتية القيادة على إمكانات هائلة ــ ولكي تتحقق هذه الإمكانات، لا بد من دعم هذا النوع من المركبات من خلال توفير البنية التحتية المادية والرقمية المناسبة، والسياسات القانونية والتنظيمية الملائمة، والقدرات المؤسساتية القوية. فهل نحن مستعدون لهذا التحدي؟
في وقت مبكر من هذا العام، تصدرت بريطانيا قائمة الدول الأوروبية التي اعتمدت فكرة قيادة المركبات بدون استخدام اليدين، حيث سمحت الحكومة باستخدام تقنية مساعدة السائق المعروفة باسم BlueCruise التي تقدمها Ford على الطرق السريعة التي تمتد بطول 2300 ميل[1]. وتسمح هذه التقنية لقائد السيارة بأن يرفع يديه عن عجلة القيادة ويرفع قدميه عن الدواسات – وإن كان سيظل عليه مراقبة الطريق.
وينتشر استخدام المركبات الآلية أو ذاتية القيادة في العديد من الأماكن الأخرى بشكل متزايد. حيث يستخدم تقنية الـ BlueCruise بالفعل حوالي 200.000 سائق في كندا والولايات المتحدة[2] ، والتي بات التوجه المستمر نحو الأتمتة جلي فيها، حتى أن سيارات الأجرة باتت تجوب الشوارع بدون سائق لترسم مشهدا متكررا في العديد من المدن، بما في ذلك سان فرانسيسكو وفينيكس.

وثمة أنواع أخرى من المركبات ذاتية القيادة التي تحولت إلى حقيقة واقعة، وإن كان ذلك لا يعني عدم وجود سائق بشري من أجل السلامة. فاليوم، تجوب ثلاث حافلات ذاتية القيادة لينشوبينج بالسويد[3]. ووفقا لتجربة حديثة تمت في الولايات المتحدة، أدى استخدام الشاحنات الآلية إلى زيادة معدلات الاستخدام لأكثر من الضعف مقارنة بالاعتماد على الشاحنات النموذجية التي يتحكم فيها سائق بشري يتبع القواعد الإلزامية[4].
ومن المنتظر أن يكون للأتمتة تأثير كبير في العديد من الصناعات. ففي مجال التعدين، على سبيل المثال، أطلقت شركة تويوتا، وهي شريكة لعبد اللطيف جميل منذ فترة طويلة، مؤخراً مشروعاً بالتعاون مع شركة كوماتسو التابعة لشركة سوميتومو من أجل تطوير مركبة خفيفة ذاتية القيادة بهدف تحسين السلامة وزيادة الإنتاجية.[5]
ولكن ماذا نعني بأتمتة المركبات؟
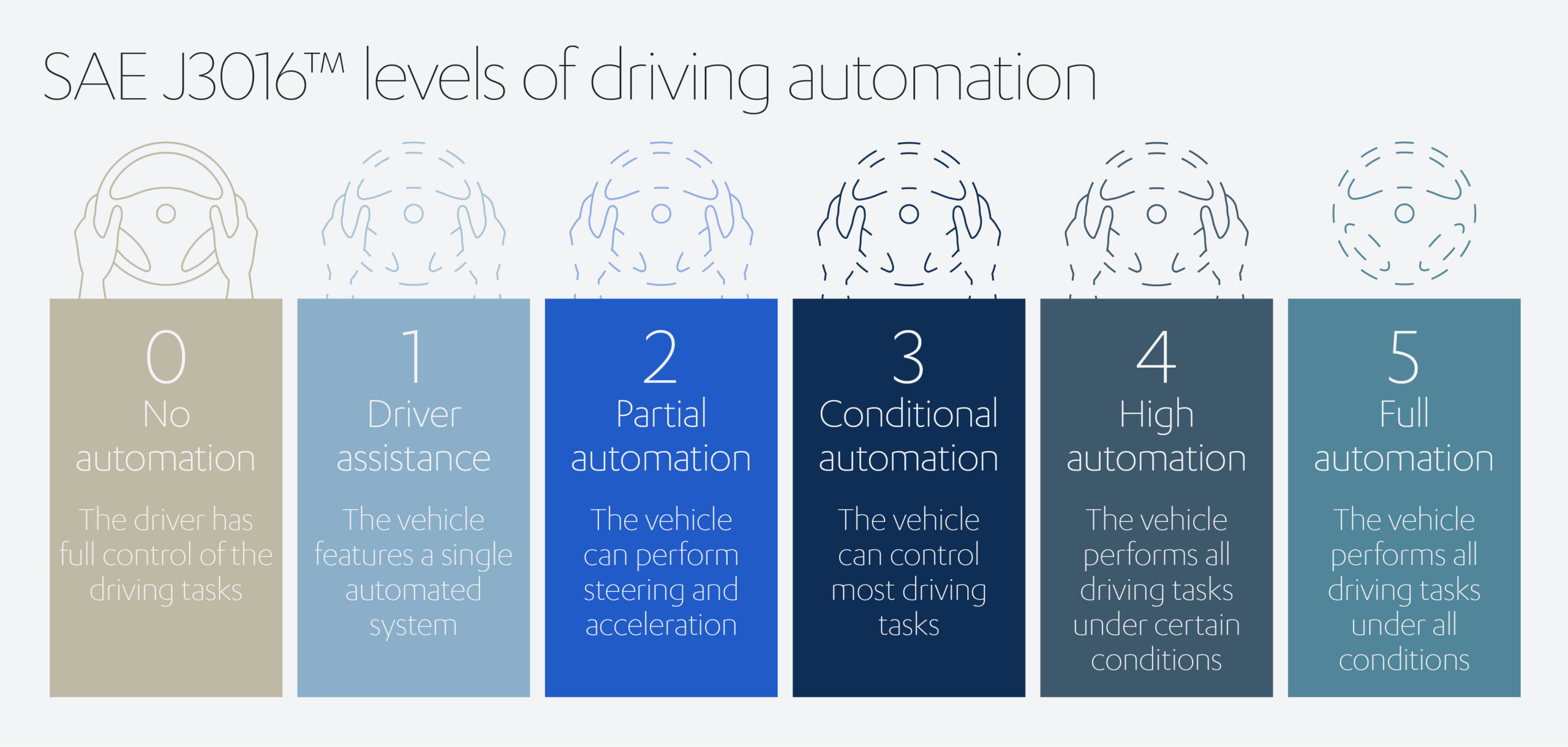
كما يوضح مثال BlueCruise، هناك عدة خطوات في رحلة التحول من المركبات التقليدية إلى المركبات ذاتية القيادة كلية. ولفهم ذلك، تصنف الأتمتة عادةً وفقا لستة مستويات[6]، بدء من المستوى 0، حيث يقوم السائق بكل شيء، ووصولاً إلى المستوى 5، والذي لا يتطلب أي تدخل بشري على الإطلاق.
في المستوى 3، تقود المركبة نفسها لبعض الوقت، على الرغم من أنه يجب على السائق أن يعود للقيادة والسيطرة على الأمر متى نبهته السيارة إلى ذلك. أما في المستوى 4، تقود المركبة نفسها طوال الوقت في ظل ظروف معينة.
ويحرز المصنعون تقدماً سريعاً في اتجاه المستويات الأعلى – فبينما تمثل تقنية “بلو كروز” من فورد Ford BlueCruise المستوى الثاني من الأتمتة، تنتمي “سيارات الأجرة الآلية” التي تجوب الولايات المتحدة إلى المستوى الرابع. على الرغم من ذلك، لا يزال حلم انتشار مركبات المستوى الخامس التي تستطيع أن تنطلق بدون سائق تماماً بعيداً بعض الشيء. ولكن ثمة جهود ضخمة تُبذل وتقدم هائل يُحرز في هذا الاتجاه. ففي الاتحاد الأوروبي (EU)، أصبح لزاماً أن تشتمل كافة المركبات الجديدة على أنظمة مكابح الطوارئ والبقاء في المسار اعتباراً من عام 2024 – وهو ما يجعل من المستحيل شراء سيارة جديدة بعد هذا التاريخ دون خاصية أتمتة من المستوى الأول.
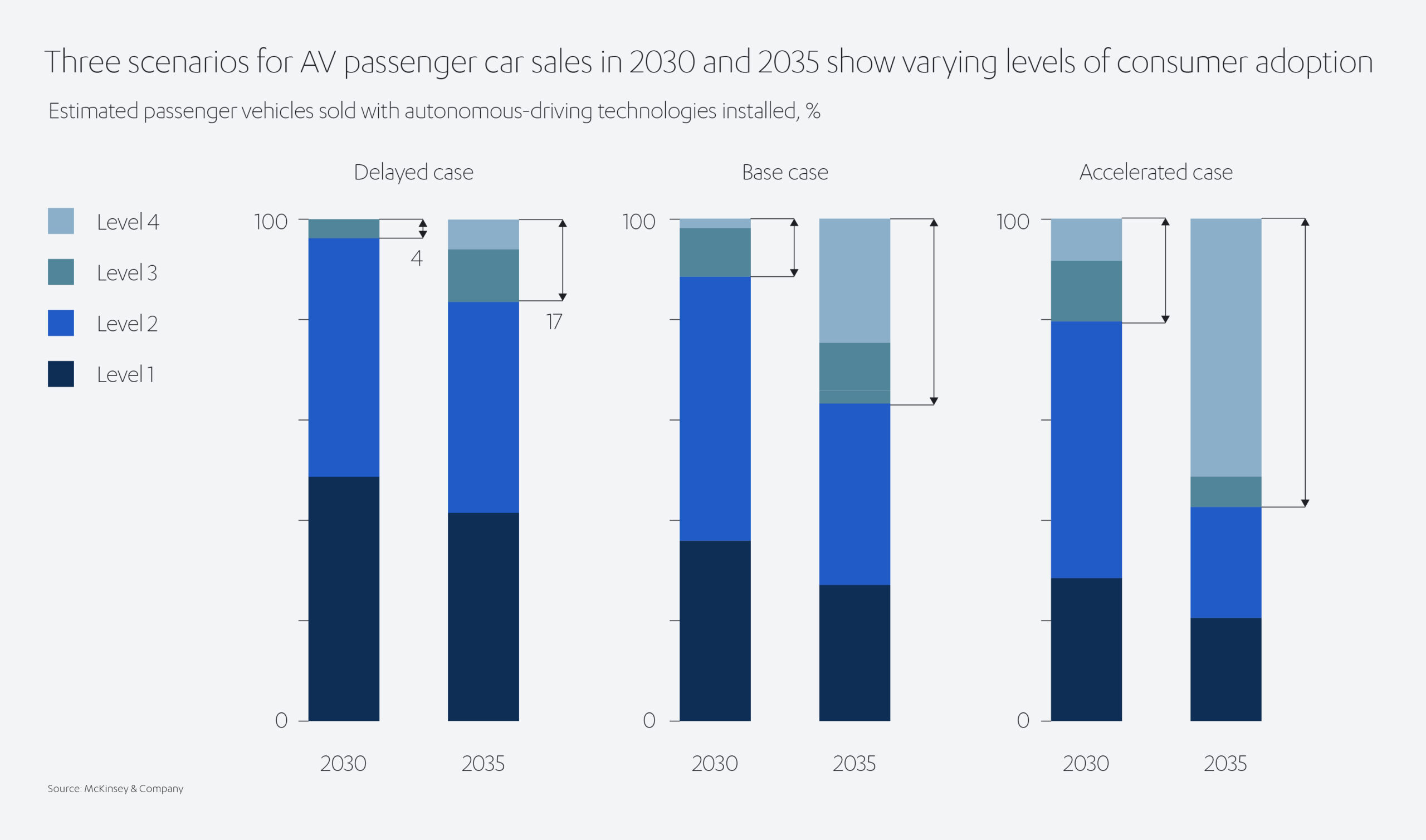
ووفقاً لشركة ماكينزي، هناك إمكانات هائلة لتنامي سوق المركبات ذات المستويات الأعلى من الأتمتة. إذ توضح إحدى الدراسات التي أجرتها الشركة هذا العام[7] أنه من المنتظر أن يتم بيع 12% من سيارات الركاب التي تتمتع بتقنيات القيادة الذاتية من المستوى 3 أو أعلى بحلول عام 2030، كما أنه من المتوقع أن يصل هذا الرقم إلى 37% في عام 2035. لكن الباحثين يؤكدون أنه لا تزال هناك ضبابية شديدة تحيط بالمشهد لاسيما وأن بعض العوامل مثل توافر التكنولوجيا واقبال العملاء تؤثر بقوة على الاتجاهات المستقبلية.
وفي ظل السيناريو “المتسارع”، تتوقع ماكينزي أن يشتمل أكثر من نصف سيارات الركاب (57٪) المباعة في عام 2035 على تقنيات القيادة الذاتية المتقدمة – ولكن في توقعاتها “الأخيرة”، كانت هذه النسبة 17٪ فقط.
البنية التحتية المادية
لا شك أن انتشار المركبات ذاتية القيادة على نطاق واسع سينطوي على آثار هائلة فيما يتعلق بتصميم الطرق التي ستنطلق فيها. فعلى سبيل المثال[8]، شملت ورقة بحثية صدرت عام 2021 عن مركز دراسات النقل بجامعة ميشيجان تحت عنوان “شوارع المستقبل” مقارنة بين توجهنا الآن نحو المركبات ذاتية القيادة والتحول من وسائل النقل التي تجرها الخيول إلى السيارات في أوائل القرن العشرين – وهو التحول الذي غير بالطبع طبيعة الطرق وشكلها.
من ناحية أخرى، من المنتظر أن ينطوي التحول إلى المركبات ذاتية القيادة على تغيرات ملحوظة في البنية التحتية للطرق. والأمر الذي لم يتبادر إلى أذهاننا هو أنه نظراً لأن حركة المركبات ذاتية القيادة أكثر دقة واتساقاً مقارنة بالقيادة البشرية، فإن تلك المركبات من المنتظر أن تكون سريعاً أخاديد في المواد القابلة للتشكيل مثل الحصى أو الأسفلت، وهذا ووفقاً لتقرير “شوارع المستقبل”، فإنه من المتوقع أن تشمل الطرق في المستقبل مسارات خرسانية مسلحة مقاومة للتآكل داخل السطح السابق الذي يسمح بتصريف مياه الأمطار من خلاله.
ولن يقتصر التأثير على الطرق وحسب، فثمة أيضاً أنظمة توجيه حركة المرور والتي تشمل: الإشارات وعلامات الطريق واللافتات.
ويشير تقرير ماكينزي لعام [9]2019 إلى أنه في المستقبل، قد تستبدل المدن الكثير من هذه اللافتات بنظام إدارة النقل الرقمي الذي يستطيع أن يغذي المركبات مباشرة بالمعلومات الأساسية، مثل حدود السرعة وقيود الانعطاف.
ما أروع هذه الرؤى! حقا انها جد مثيرة، ولكن الكثيرين يعتقدون أن الأمر قد يستغرق بعض الوقت قبل أن تصبح حقيقة.

وقد أصدر المنتدى الدولي للنقل (ITF)، وهو منظمة حكومية دولية تضم 64 دولة، أصدر تقريراً في عام 2023 يبحث في متطلبات البنية التحتية للمركبات ذاتية القيادة[10]، بناءً على مناقشات مجموعة عمل دولية.
وتؤكد الوثيقة أن تفاؤلنا فيما مضى بشأن وتيرة التحول إلى السيارات ذاتية القيادة قد تراجع، وبات حلم وصول المركبات ذاتية القيادة من المستوى 5 “على بعد عدة عقود”. وبالنظر إلى ذلك، وكما أكد تقرير المنتدى الدولي للنقل (ITF) “لا توجد حاليًا أية دعوات من القائمين على الصناعة أو المطورين لتأسيس بنية تحتية لأغراض خاصة تقتصر على استخدام المركبات ذاتية القيادة ” … فهدفهم يتمثل في انتاج مركبات قادرة على السير على شبكة الطرق الحالية.”
ولكن ذلك لا يعني إطلاقاً أنه ليس هناك ما يمكن القيام به من أجل وضع بنية تحتية مادية أفضل للمركبات ذاتية القيادة. فوفقاً لتقرير المنتدى الدولي للنقل، يمكن لصيانة الأسطح وإشارات المرور والعلامات أن تضمن استخدام أكثر أماناً للمركبات ذاتية القيادة. ويشير ذلك إلى تجربة محلية حيث اختلط الأمر على حافلة ذاتية القيادة عند اقترابها من محطة للحافلات بجوار دوار. إذ لم تتمكن الحافلة من تفسير علامات الطريق بفك شفرة الخاصتين معاً، وهو ما يعني أن الحافلة لن تستطيع التوقف عند المحطة حتى يتم تعديل العلامات.
وقد خلص التقرير إلى أن علامات الطريق يمكن أن تصبح أكثر أهمية للسلامة مع بدء استخدام المركبات ذاتية القيادة. وإذا كان الأمر كذلك، فيجب اعتبار هذه العلامات جزءاً من مخططات الصيانة. لكن الضبابية التي تحيط بالمتطلبات الدقيقة للمركبات ذاتية القيادة تعني أنه حتى الآن ليس ثمة نموذج لأفضل الممارسات التي يمكن للبلدان الأخرى أن تتطلع إلى محاكاتها. وبشكل عام، وكما يتوقع التقرير، من المرجح أن يقع عنصر الصيانة ضمن الأولويات المهمة مع انتشار المركبات ذاتية القيادة.
البنية التحتية الرقمية
تبرز، في الوقت الحالي، أهمية تصميم المركبات ذاتية القيادة على نحو يُمكنّها من التفاعل مع اللافتات والعلامات الطرقية المادية. وثمة أيضا إمكانية لتزويد هذه المركبات بإمكانات تجعلها قادرة على التواصل بكامل أركانها بالعالم الرقمي. فبدلاً من “قراءة” إحدى اللافتات المادية، على سبيل المثال، يمكن للمركبة المتصلة بالإنترنت أن تستقبل المعلومات من أجهزة الاستشعار المثبتة على جانبي الطريق، أو من أية مركبة أخرى، أو من نظام إدارة حركة المرور، مما يساعدها على السير بأمان وكفاءة. وبالمثل، يمكن للمركبة أن ترسل معلومات حول الطريق والطقس وحركة المرور، لمساعدة مستخدمي الطريق الآخرين على أن يحذو حذوها.
لذا، على الرغم من أن وجود نظم رقمية لإدارة حركة المرور لا يزال حلماً بعيد المنال، فإنه من المتوقع أن تتزايد أهمية خاصية الاتصال بالنسبة للمركبات ذاتية القيادة. وهذا يعني أن دعم المركبات ذاتية القيادة لن يقتصر على البنية التحتية المادية وحسب بل سيشمل البنية الرقمية أيضا – ونعني هنا مجموعة النظم والهياكل والأجهزة اللازمة لتمكين المركبة من التواصل على الشبكة الرقمية. ويؤكد التقرير الصادر عن منتدى النقل الدولي أن البنية التحتية الرقمية قد تشتمل على شبكات اتصالات سلكية ولاسلكية ونظم لجمع البيانات وتخزينها، فضلاً عن إمكانية الحصول على خدمات المعلومات، مما يساعد على تحديد موقع المركبة وتوفير خدمات الملاحة وإظهار التوقيت.
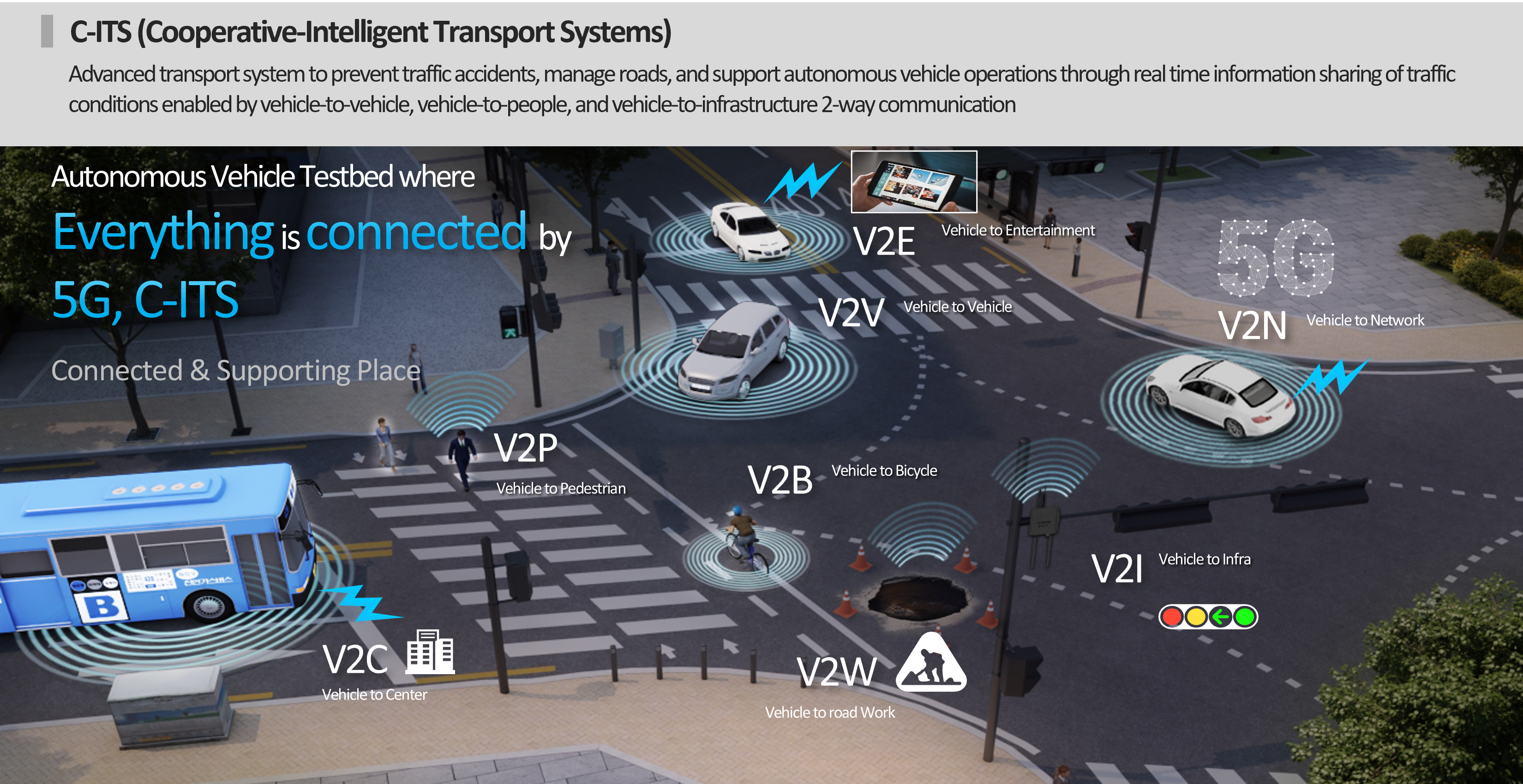
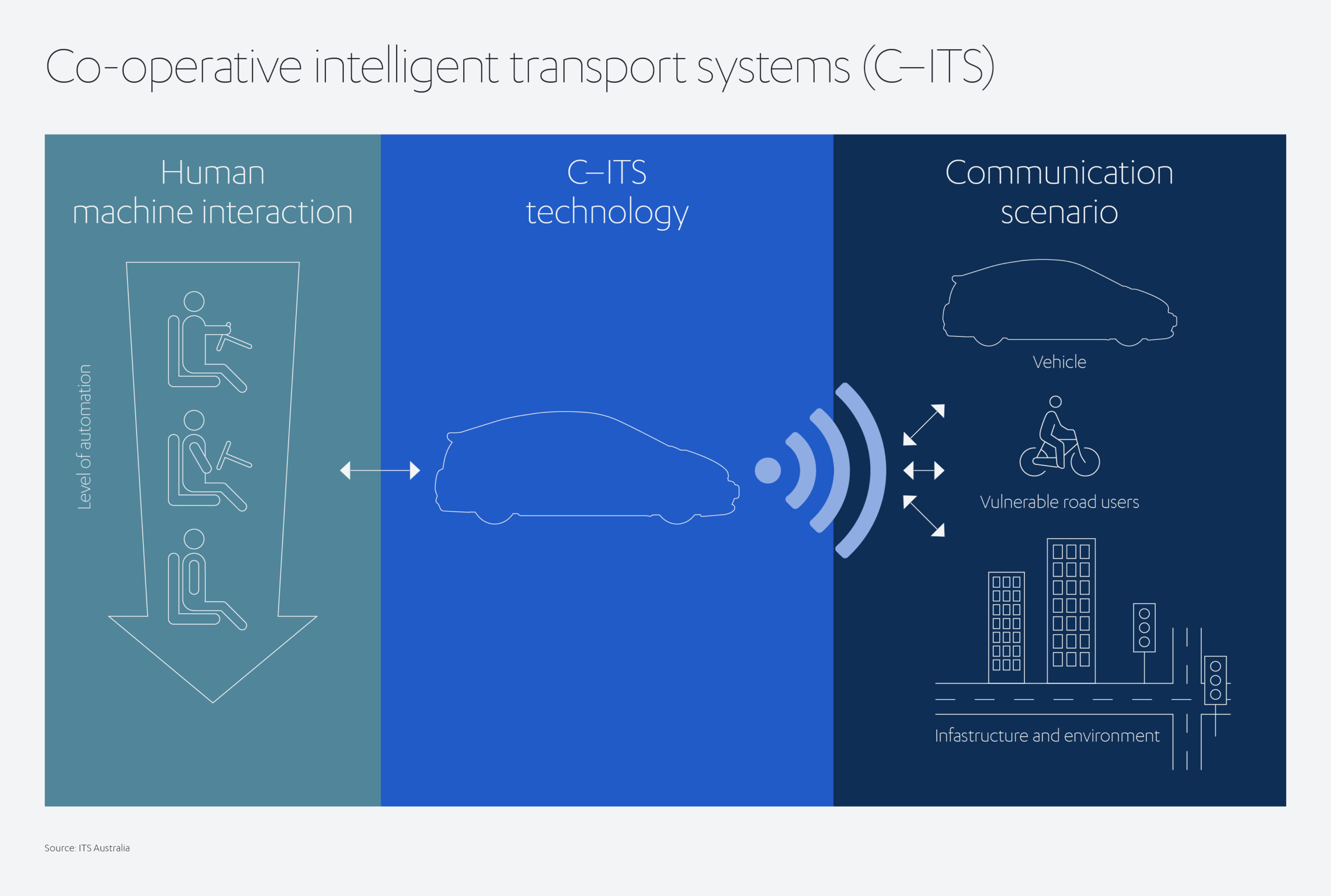
وقد حظيت بعض الإمكانات المستحدثة في البنية التحتية الرقمية بالفعل ببعض التطوير. فعلى سبيل المثال، يمكن استخدام نظم النقل الذكية التعاونية والمعروفة اختصارا ب(C-ITS) لإعطاء المركبات تحذيرات مبكرة بشأن الاختناقات المرورية أو أشغال الطرق أو الحوادث المعطلة للطريق أمامها.
وبالفعل اعتمد عدد من المناطق هذا النهج. ففي كوريا، على سبيل المثال، تُطوِّر حكومة مدينة سيول نظام نقل ذكي تعاوني متصل بشبكات الجيل الخامس من الإنترنت، وذلك في إطار مشروعها الأوسع نطاقاً المعني بعمليات النقل وخدمات المعلومات (TOPIS)[11]. إذ تعكف السلطات على وضع بنية تحتية لنظام النقل الذكي التعاوني على امتداد 121 كم من الطرق الرئيسة بالمدينة، وذلك لغرض دعم عملية التواصل بالزمن الحقيقي بين المركبات والمشاة والبنية التحتية.
تخضع حالياً هذه التقنية الحديثة للتجربة في منطقة مخصصة في حي سانجام دونج، هذا فضلاً عن تركيب نظم مساعدة السائق المتقدمة في الحافلات وسيارات الأجرة. ويسمح هذا النظام للسائق بتبادل المعلومات، مع مراكز إدارة حركة المرور والمركبات الأخرى أثناء القيادة. وتتضمن تلك المعلومات ظروف الطريق، مثل وجود حفر تعرقل حركة السير. وقد صرحت حكومة سيول أن هذا النهج من شأنه أن يساعد في منع وقوع الحوادث من خلال توجيه المركبات لتغيير المسارات أو الممرات التي تتخذها، إذا لزم الأمر.
في مكان آخر، وتحديداً في أستراليا، ثمة مشروع آخر يقوم على الاستفادة من وحدات نظم النقل الذكية والتعاونية المثبتة على جانبي الطريق، والتي تبث معلومات بشأن إشارات المرور وتنقلها إلى المستخدمين على طريق بروس السريع في كوينزلاند، والذي يبلغ طوله 1500 كلم، كما توفر هذه الوحدات تحذيرات تفيد بأن الإشارة حمراء أو أن هناك مشاة على الطريق[12]. وقد صرح مارك بيلي، وزير النقل والطرق الرئيسية في كوينزلاند، أنه “من المتوقع أن يقلل” هذا النظام “من حوادث التصادم بنسبة 20%”.
وبالمثل، خلصت إحدى التجارب النموذجية التي أجريت في البرتغال إلى أنه يمكن استخدام تقنية نظم النقل الذكية والتعاونية لتنبيه المركبات إلى المخاطر ومدة التأخير المتوقعة والمرتبطة بالدخول إلى نفق جاردونها الذي يبلغ طوله 1620 متراً. وقد صرح خورخى ريبيرو، الرئيس التنفيذي لشركة ألبسمارت لخدمات التكنولوجيا والمشاركة في التجربة، إن هذا المشروع “قد أثبت قدرتنا على إيصال رسائل تحذيرية دقيقة وآنية للسائقين الذي يقتربون من النفق، بما يسمح لهم حتى بالخروج من الطريق في المنعطف التالي، إذا لزم الأمر”.[13]
وتعتمد معظم نظم النقل الذكية التعاونية الحالية على فكرة التواصل بين المركبات والبنية التحتية للطرق، ولكن ثمة بعض المبادرات التي تدرس أيضاً احتمالية الاستعانة بنظم أكثر تقدماً تتواصل فيها المركبات ذاتية القيادة مع بعضها البعض ومع غيرها من مستخدمي الطرق أيضاً. وقد خلصت دراسة أسترالية أجريت عام 2020 وشاركت فيها جامعة ملبورن[14]، إلى أن ثمانية نهج مختلفة خاصة بنظم النقل الذكية التعاونية، والتي تنطوي على تواصل بين المركبات، وعناصر البنية التحتية، وغيرها من مستخدمي الطرق، قد ساهمت في الحد من حوادث التصادم بنسبة تصل إلى 78%.
وحال انتشر تبني هذه النهج، من المحتمل أن تصبح هناك حاجة لتحسين مستوى الاتصال لدعمها.
ووفقا لمنتدى النقل الدولي[15]، من المتوقع أن يسهم النقل الآلي في استحداث متطلبات جديدة خاصة بشبكات الاتصالات المتنقلة على طول الطرق الرئيسة، وأن تتضمن هذه المتطلبات ضرورة وجود شبكات الجيل الخامس وأحدث جيل من شبكات الاتصال المتنقلة والتي توفر سرعات أعلى وفترات انتظار أقل. ووفقاً للتقرير الصادر عن المنتدى، يمكن لكثير من التطبيقات المبكرة لعملية الأتمتة أن تعمل باستخدام شبكات الجيل الرابع الحالية، ولكن مع تطور التقنيات والخدمات، تزداد الحاجة إلى توفر شبكات الجيل الخامس وإمكاناتها.
وثمة جانب آخر من البنية التحتية الرقمية يعتبر بالغ الأهمية للمركبات ذاتية القيادة، ألا وهو البيانات، ويشمل ذلك الخرائط فائقة الوضوح (HD). وهي تتكون من مجموعات مختلفة من المعلومات التاريخية والآنية، وتوفر تمثيلاً ثلاثي الأبعاد للبيئة المحيطة بالمركبة. ويتميز هذا التمثيل بدقته ويشمل حتى ما يبعد عن المركبة بسنتيمترات، وتُعد هذه الخرائط جد ضرورية للتسيير الآمن (للمركبات المتصلة ببعضها ببعض وبالإنترنت والآلية[16]). وتستخدم المركبات ذاتية القيادة هذه الخرائط في الملاحة، ولذا لابد من توفير معلومات كافية ومفصلة، كما يجب أن تخضع هذه الخرائط لتحديثات دورية. وتمثل الخرائط، ربما أكثر من أنواع البيانات الأخرى، عنصراً اساسياً من البنية التحتية الجديدة للمركبات ذاتية القيادة. ويرى العديد من المطورين أن هذه الخرائط جد مهمة من أجل تحقيق السلامة والأمان[17]. ولكن، نظراً لطبيعتها المعقدة وكثرة البيانات بها، تحتاج معالجة هذه الخرائط توافر قوة حوسبة كبيرة داخل المركبة.
يبدو أن عملية تطوير البنية التحتية التي يمكنها تزويد المركبات ذاتية القيادة بالبيانات وشبكات الاتصال الضرورية لتشغيلها تكتسب أهمية واضحة، ومن المنتظر أن تزداد هذه الأهمية مع تطور إمكانات المركبات واستخداماتها. ويعتقد بعض الخبراء أن عملية الاتصال الرقمي ستكون مهمة للمركبات ذاتية القيادة بقدر أهمية الغاز للمركبات التقليدية.
السياسات والمؤسسات
عندما ننظر في الجوانب العملية المصاحبة لإدخال المركبات ذاتية القيادة على الطرق بأمان، نجد أنه سرعان ما يتضح أنه أمر يتطلب تغييرات جوهرية على الصعيد المؤسساتي والسياساتي. ويُعزى هذا إلى الاختلافات الجوهرية بين المركبات ذاتية القيادة والمركبات التقليدية التي يقودها الإنسان، ومنها على سبيل المثال، أن الأولى تحتاج إلى أن تخضع لاختبارات مكثفة قبل التشغيل. وتشمل هذه الاختبارات تجارب من جانب المصنعين أثناء عملية تطوير المنتج، واختبار التحقق الرسمي من سلامتها وتجريه السلطات المعنية باعتماد المركبات رسمياً قبل استخدامها.
ويركز اختبار السلامة الذي يُجرى على المركبات التقليدية على التحقق من امتثال بعض الآليات مثل المكابح للمعايير ذات الصلة. لكن الأمر يختلف عندما نتحدث عن المركبات ذاتية القيادة. فاستبدال وظائف الاستشعار والإدراك البشرية بالذكاء الاصطناعي يُشكّل ما أطلق عليه منتدى النقل الدولي اسم “النظام المعقد كثيف البرمجيات”. وهذا من شأنه أن يجعل عملية التقييم أكثر تعقيداً.

ويرى إدوارد جريفور، المدير المساعد في المعهد الوطني الأمريكي للمعاير والتكنولوجيا (NIST) (https://www.nist.gov/) أن:
“هناك أمور كثيرة لا نعلم عنها أي شيء”، فيما يتعلق بأتمتة عملية القيادة، وقياس أداء عملية القيادة، والتأكد من سلامة تسيير وتشغيل المركبات الآلية[18].
لذلك، يتعاون المعهد الوطني للمعايير والتكنولوجيا مع القائمين على صناعة المركبات ذاتية القيادة وغيرهم من أصحاب المصلحة، من أجل الوصول إلى توافق في الآراء بشأن المعايير اللازمة لتقييم السلامة في المركبات وتحديد نهج لقياسها. وقد أدت هذه المحادثات إلى تطوير مفهوم مواصفات مغلف التشغيل، والتي تحدد قدرات المركبة المعنية وإمكاناتها. وتشمل هذه المواصفات الظروف التي يمكن تشغيل المركبة فيها (مثل الأمطار والثلوج) وكذلك السلوكيات التي يمكن أن تنتهجها المركبة (مثل تغيير المسار والتنقل فيما بين التقاطعات). وتتمثل الفكرة التي تقوم عليها هذه المواصفات في وضع إطار يمكن للباحثين والمطورين والمنظمين استخدامه لإنشاء سيناريوهات الاختبارات الذي ستخضع لها المركبة. وأضاف جريفور موضحاً: “انظر إلى مواصفات مغلف التشغيل وكأنها وصف وظيفي ومقاييس ينبغي أن تستوفيها جميع المركبات ذاتية القيادة“.
بالإضافة إلى ما سبق، يتعاون المعهد الوطني للمعايير والتكنولوجيا مع المطورين من أجل تطوير “منصة محاكاة مشتركة” تهدف إلى دراسة معيار سلامة المركبات ذاتية القيادة، وتجمع هذه المنصة بين عمليات المحاكاة الرائدة للعناصر المهمة في المركبات، مثل أجهزة الاستشعار، والمكابح، والمحركات. ويمكن الاستفادة من ذلك في تقييم مختلف جوانب معيار السلامة وطرازات المركبات في الوقت نفسه، وذلك لغرض التوصل لحلول من شأنها معالجة المشكلات، والتي تشمل تجنب عمليات التصادم، والامتثال لحدود السرعة، وقواعد تجاوز المركبات الأخرى. ومع ذلك، يعترف جريفور أنه لا تزال هناك بعض الأمور التي تتعلق باختبار معيار سلامة المركبات ذاتية القيادة عالقة دون حل. فعلى سبيل المثال، يمكن أن يخضع السائقون البشر إلى اختبار الكفاءة ويمنحون التراخيص، بينما يتمثل التحدي الأكبر أمام المركبات ذاتية القيادة، على حد قوله، في أننا لسنا على دراية بعد بطريقة اختبار السائق الآلي، وهو النظام المسؤول عن قيادة السيارة.
من ناحية أخرى، سلطت المحادثات التي أجريت مع المجتمع المعني بالمركبات ذاتية القيادة الضوء على الحاجة إلى إجراء مزيد من البحوث في مسائل من قبيل: التفاعل بين النظم والمركبة، والتعرف على الأشياء الموجودة في البيئة المحيطة والاستجابة لها، والمخاطر ذات الصلة بالذكاء الاصطناعي. وثمة مسألة أخرى ذات صلة بمعيار السلامة ترتبط بالأمن السيبراني، والذي يشيع فيه على نطاق واسع حقيقة مفادها أنه كلما زاد اعتماد المركبات ذاتية القيادة على عملية الاتصال بالنظم الأخرى، زاد معدل المخاطر. فوفقاً للمنظمة الكندية للمقاييس (CSA) (https://www.csagroup.org/en-gb/)، “كشفت” البحوث الأولية “عن نطاق واسع من ثغرات الهجوم المادية ونقاط أخرى يمكن اختراقها عن بُعد، تلك التي يمكن أن يستفيد منها العملاء غير الشرفاء”، وكذلك أوضحت أن المركبات ذاتية القيادة ستبرز أكثر على الساحة بينما تنطلق الصناعة قدماً نحو الوصول بالأتمتة إلى المستوى الخامس.[19]

شركاؤنا في مضمار المركبات ذاتية القيادة
تعمل شركة تويوتا موتور كوربوريشن، وهي شريك عبد اللطيف جميل في مجال السيارات منذ فترة طويلة، تعمل على تطوير نهج ذي شقين خاص بتقنية المركبات ذاتية القيادة.
تهدف منصة شركة تويوتا للسلامة والمعروفة باسم جارديان “Guardian” إلى “الجمع بين تحكم السائق وتحكم نظام الذكاء الاصطناعي في السيارة من أجل تسييرها بشكل آمن، وذلك من خلال تقاسم الأدوار وتحقيق الاستفادة القصوى من المهارات البشرية والآلية”. وتطلق تويوتا على هذا النظام مسمى “التحكم المختلط المغلف”.
أما النهج الثاني فيعرف باسم شوفور ‘Chauffeur’. وهذا النهج عبارة عن تقنية متكاملة خاصة بالمركبات ذاتية القيادة تسمح للمركبة أن تسير بمفردها دون أي إشراف بشري. ولعل ذلك يتوافق مع المستويين 4 و5 للقيادة الذاتية.
ويستهدف هذا النهج بشكل أولي أولئك “الذين لا يستطيعون أو يختارون عدم القيادة بسبب العمر أو العجز أو أي سبب آخر”.
ومن خلال شركتها الاستثمارية الناشئة تويوتا فينتشرز، تقوم تويوتا أيضًا بتمويل أحدث الأبحاث التي تعني بهذا النوع من الأنظمة الرقمية المتصلة ببعضها البعض، والتي ستساعد في رسم ملامح مستقبل تكنولوجيا المركبات ذاتية القيادة
وثمة تقنية Apex.AI، التي تعمل على تطوير برمجيات أساسية معتمدة من حيث السلامة وذلك من أجل دفع عجلة التحول السريع إلى المركبات والتنقل القائمين على البرمجيات.
من ناحية أخرى، تسعى شركة ريفيان، الرائدة في مجال السيارات الكهربائية والتي كانت عائلة جميل من أوائل المستثمرين الرئيسيين فيها، تسعى إلى احتلال الصدارة في مضمار تكنولوجيا المركبات ذاتية القيادة.
فهي تعمل على تطوير نظام للشحن يعتمد على تقنية الذكاء الاصطناعي ويستطيع أن يساعد في إطالة عمر البطاريات ثلاث مرات أكثر مقارنة بالبدائل التقليدية.
كما أن مركباتها المزودة ببرامج حاسوبية تأتي مع العديد من الأنظمة التي زودت بها مسبقاً، والتي يمكن تحديثها كما يحدث مع تطبيقات الهواتف المحمولة. وتلك الأنظمة تسمح بالتحكم في أهم خصائص الاتصال مثل: مراقبة السائق و تكنولوجيا المعلومات ومتابعة الحرارة والتحكم فيها و مساعدة السائق على القيادة دون استخدام اليدين.

رواد المستقبل
حتى في هذه المرحلة المبكرة نسبياً، يبدو جلياً أن اعتماد المركبات ذاتية القيادة لا يقتصر ببساطة على إصدار بعض القواعد أو الاختبارات الجديدة. بل أن ذلك سوف ينطوي على تغييرات جوهرية على المستوى الهيكلي – فيما يتعلق بالمناهج والمعايير، وكذا اللوائح والسياسات والقوانين والهياكل المؤسسية التي تدعمها.
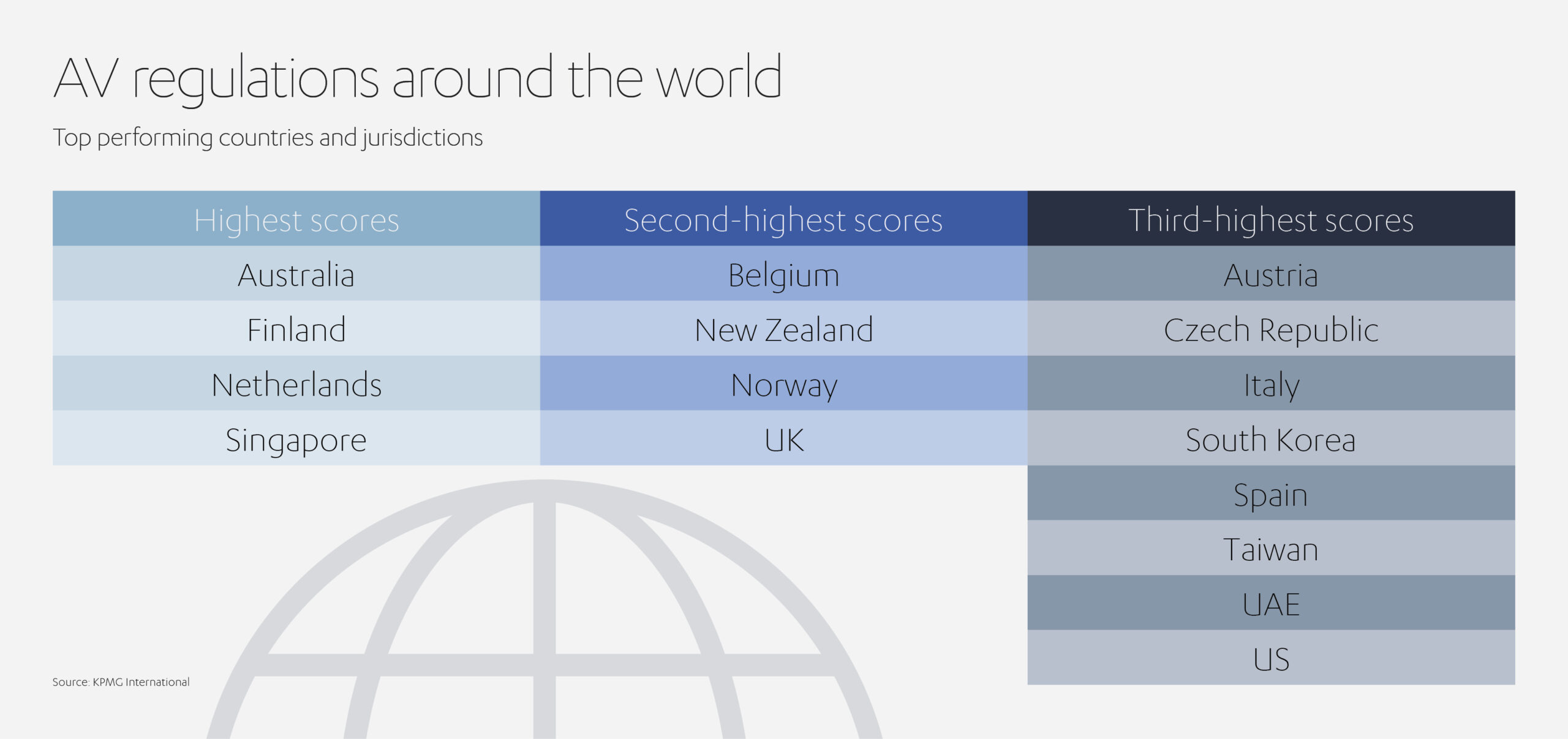
وعلى الصعيد العالمي، تعتبر فنلندا من البلدان الرائدة في هذا الصدد. فقد مُنحت مؤشر الجاهزية للمركبات ذاتية القيادة لعام 2020[20] الخاص بشركة كيه بي إم جي. وهذا المؤشر يعتمد على عدد من المعايير في تقييم جاهزية البلدان واستعدادها لاعتماد المركبات ذاتية القيادة. وفي هذا الصدد، مُنحت فنلندا أعلى الدرجات فيما يتعلق باللوائح الخاصة بالمركبات ذاتية القيادة والتي تدعم استخدامها واختبارها (إلى جانب أستراليا وهولندا وسنغافورة). ويؤكد التقرير إن الهيئات التنظيمية في فنلندا تتمتع بالمرونة وأن التشريعات تسمح بإجراء اختبارات مستقلة متعددة لأشكال مختلفة من وسائل النقل، مع إمكانية الحصول على التصاريح دون عناء، ناهيك عن يسر التعامل مع السلطات.
من ناحية أخرى، يشير التقرير الصادر عن المنتدى الدولي للنقل إلى فنلندا باعتبارها رائدة عالمية في هذا المضمار. وهو يسلط الضوء على كيفية نجاح الدولة في إرساء نقطة اتصال واحدة داخل الجهاز الخاص بها الذي يقوم بإصدار الموافقات وذلك لغرض الحصول على تصاريح الاختبار. كما يقوم التقرير بتقييم مخطط الاختبارات من خلال المناقشات التفاعلية، حيث يطلب معلومات حول بعض الجوانب مثل منطقة الاختبار، والسلامة والأمن، والمعلومات التقنية.
والجدير بالذكر أن جاهزية فنلندا لعالم المركبات ذاتية القيادة ليست من قبيل الصدفة. فوفقًا لخبراء شركة كيه بي إم جي، بذلت الدولة جهود مضنية من أجل إعداد نفسها. وقد شمل ذلك السماح بإجراء التجارب على طرقها وتطوير قانون المرور على الطرق والذي دخل حيز التنفيذ في يونيو 2020 – والحث على إجراء التعديلات في تشريعات الاتحاد الأوروبي ذات الصلة. في هذا الصدد، يقول هينك-جان كرويت، مدير المجموعة الإستراتيجية العالمية لشركة كيه بي إم جي في فنلندا: “من الناحية القانونية، لقد تم وضع اللبنات الأساسية بالفعل في وقت سابق”.
بالتعاون يتحقق الحلم
لا شك أنه بدون أن يكون هناك تنسيق وتوجيه استراتيجي، سيصعب على الحكومات التفاوض بشأن قضايا السياسات العديدة التي تتعلق بالمركبات ذاتية القيادة.
وتسعى بعض الدول إلى توفير حل لهذه المعضلة من خلال الهيئات المتخصصة كمركز المملكة المتحدة للمركبات المتصلة وذاتية القيادة والمعروف اختصاراً بـ (CCAV) [21]
وقد تولت وحدة السياسات هذه، وهي مبادرة مشتركة بين وزارتي الأعمال والنقل في البلاد، تولت الإشراف على بعض الأنشطة المهمة مثل جذب 450 مليون جنيه إسترليني من الاستثمارات العامة والخاصة، وتطوير قانون للممارسات بهدف اختبار وسن تشريعات مبدئية جديدة، وكذا تأمين مشاركة السلطات الإقليمية والمحلية[22]. كما كلف مركز المملكة المتحدة للمركبات المتصلة وذاتية القيادة اللجان القانونية في المملكة المتحدة بمراجعة الإطار القانوني الخاص بالمركبات ذاتية القيادة. وقد أصدر المركز تقرير تم نشره في عام [23]2023، اشتمل على توصيات بشأن بعض النقاط مثل الموافقات والتراخيص ومراقبة الأداء والتسويق والمسؤولية الجنائية والمدنية.
ودوليا، يلزم تحقيق مستوى مماثل من التنسيق والتعاون. فعلى سبيل المثال، من الممكن أن يسهم الجمع بين الخبرات الدولية في وضع إجراءات موحدة للاختبار والتحقيق بشأن وقوع حوادث التصادم، مما يسهم في دخول المركبات ذاتية القيادة في السياق القضائي بشكل أسرع.
وثمة مشكلة أخرى تتمثل في عدم وجود إجماع على طرائق الاتصال المميزة، وهو ما يجعل من الصعب تبرير أية استثمارات في الوقت الحالي. والتعاون العالمي من أجل التوصل إلى معايير متفق عليها من شأنه أن يزيد من ثقة صُناع السياسات فيما يتعلق بالمجالات التي يمكن الاستثمار فيها، كما أنه يساعد المطورين في إيجاد حلول يمكن تطبيقها على نطاق واسع. ووفقاً للمنتدى الدولي للنقل، قد تحظى العمليات الخاصة بالمركبات ذاتية القيادة بالدعم والتحفيز في مناطق مختلفة من خلال تطوير “نموذج” يمكن تعديله حسب الحاجة كي لا نحتاج إلى ترتيبات جديدة في كل مدينة.
ويشير تقرير المنتدى الدولي للنقل إلى أنه “للتعامل مع الضبابية التي تشوب كيفية تسيير المركبات ذاتية القيادة والمكان المناسب لذلك، لابد من تحقيق التعاون بين القائمين على الصناعة وصانعي السياسات على مستوى العالم، والذين سيتعاونون معاً لشرح أوجه عدم اليقين وتطوير نهج معياري يمكن أن يشجع على الابتكار ويحمي الجمهور في الوقت نفسه”. [24]
ويعد مشروع C-Roadsمن المشروعات الجديرة بالدراسة[25]. فالمشروع يعد بوتقة ضمت الدول الأعضاء في الاتحاد الأوروبي ومشغلي الطرق للعمل على النشر المنسق لأنظمة النقل الذكية التعاونية. وهناك أيضاً منتدى الأمم المتحدة العالمي لتنسيق القواعد التنظيمية المتعلقة بالمركبات، والذي يعمل على تطوير إطار تنظيمي عالمي خاص بالمركبات ذاتية القيادة، ويشمل ذلك ما ظهر مؤخراً من رفع الحد الأقصى لسرعة هذه المركبات إلى 130 كيلومتر في الساعة[26]. وإذا تمكنت الحكومات والقائمين على الصناعة في مختلف أنحاء العالم من التحرك والتأسيس على مثل هذه المبادرات بطموح وشجاعة، فسوف تكون في وضع جيد يسمح لها بتسخير الإمكانات الهائلة التي تنطوي عليها المركبات ذاتية القيادة.

وقال فادي جميل، نائب الرئيس ونائب رئيس مجلس الإدارة بشركة عبد اللطيف جميل: “بإمكان تقنيات المركبات ذاتية القيادة أن توفر حلول للتنقل تتسم بالمزيد من الملائمة والسلامة لمجتمعنا. ومع تحول مدننا إلى مدن أكثر ذكاءً وزيادة اعتمادها على التكنولوجيا، برزت إمكانيات المركبات ذاتية القيادة في الحد من الاختناقات المرورية وتحقيق المزيد من السلامة لكل من قائد المركبة ومستخدمي الطريق وتحقيق تجربة قيادة ممتعة وآمنة.
والأهم من ذلك أن المركبات ذاتية القيادة من شأنها أن تسهم في بلوغ الحلم الأخضر والمحافظة على البيئة وجعل المجتمعات العمرانية صالحة للعيش وجعل الاقتصادات أكثر كفاءة، وكل ذلك يلعب دوراً مهماً في رحلتنا نحو بلوغ صافي الانبعاثات الصفرية“.
[1] https://news.sky.com/story/self-driving-ford-car-granted-approval-for-hands-free-use-on-british-motorways-in-european-first-12856889
[2] https://techmonitor.ai/technology/ai-and-automation/autonomous-vehicles-uk-motorways-department-for-transport-ford-bluecruise
[3] https://linkopingsciencepark.se/linkoping-gets-its-third-autonomous-vehicle/
[4] https://www.bcg.com/publications/2022/mapping-the-future-of-autonomous-trucks
[5] https://global.toyota/en/newsroom/corporate/39205159.html
[6] https://www.sae.org/blog/sae-j3016-update
[7] https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/autonomous-drivings-future-convenient-and-connected
[8] https://www.cts.umn.edu/publications/report/future-streets-leveraging-autonomous-shared-vehicles-for-greater-community-health-equity-livability-and-prosperity
[9] https://www.mckinsey.com/industries/travel-logistics-and-infrastructure/our-insights/a-new-look-at-autonomous-vehicle-infrastructure
[10] https://www.itf-oecd.org/preparing-infrastructure-automated-vehicles
[11] https://topis.seoul.go.kr/openEngCits.do
[12] https://cms.its-australia.com.au/assets/images/PDFs/Connectivity-in-C-ITS-White-Paper_FINAL_web.pdf
[13] https://www.traffictechnologytoday.com/news/incident-detection/portuguese-smart-tunnel-trial-paves-the-way-for-c-its-system-rollout.html
[14] https://www.traffictechnologytoday.com/news/connected-vehicles-infrastructure/white-paper-australian-research-reveals-connected-talking-cars-could-save-lives.html
[15] https://www.itf-oecd.org/preparing-infrastructure-automated-vehicles
[16] https://www.csagroup.org/wp-content/uploads/CSA-Group-Research-Physical-and-Digital-Infrastructure-for-Connected-and-Automated-Vehicles-_CAV_.pdf
[17] https://www.itf-oecd.org/preparing-infrastructure-automated-vehicles
[18] https://www.nist.gov/blogs/taking-measure/cruising-toward-self-driving-cars-standards-and-testing-will-help-keep
[19] https://www.csagroup.org/wp-content/uploads/CSA-Group-Research-Physical-and-Digital-Infrastructure-for-Connected-and-Automated-Vehicles-_CAV_.pdf
[20] https://kpmg.com/xx/en/home/insights/2020/06/autonomous-vehicles-readiness-index.html
[21] https://www.gov.uk/government/organisations/centre-for-connected-and-autonomous-vehicles
[22] https://www.itf-oecd.org/preparing-infrastructure-automated-vehicles
[23] https://www.lawcom.gov.uk/project/automated-vehicles/
[24] https://www.itf-oecd.org/preparing-infrastructure-automated-vehicles
[25] https://www.c-roads.eu/platform.html
[26] https://unece.org/media/transport/Road-Safety/press/368227


 أُضيفت إلى الملف الصحفي
أُضيفت إلى الملف الصحفي